Математическая модель САУ УШ

По рассмотренным выше математическим моделям звеньев, входящих в данную систему, составлена обобщенная математическая модель системы управления подвижными шиберами (рис.2.26).
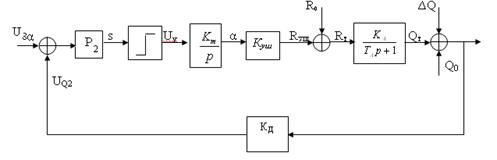
Рис.2.26. Обобщенная математическая модель системы управления подвижными шиберами
Из рис.2.26 выведем выражение для объекта управления, которое будет иметь следующий вид:
![]() (2.11)
(2.11)
Обозначим ![]() и перейдем от символической формы представления (2.11) к дифференциальному уравнению:
и перейдем от символической формы представления (2.11) к дифференциальному уравнению:
![]()
![]()
![]() (2.12)
(2.12)
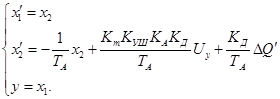
Теперь представим объект управления в форме Коши, для этого введем переменные состояния:
![]()

Тогда, исходя из (2.12), система уравнений в форме Коши примет вид:
Характеристика предприятия
Медно-цинковое месторождение «Чебачье» является одним из крупных по запасам месторождений России и стран СНГ. Месторождение было открыто в 1982 году. В настоящее время конечным продутом предприятия является медная и медно-цинковая руда. Его извлечение из руды производится по технологии «кучное выщелачивание ...
Возведение нулевого цикла. Технология и организация
работы. Монтаж фундаментных блоков
До начала работ по укладке фундаментных подушек проверяется нивелировкой правильность отметки основания. При этом ниже подошвы основания не должно быть разрыхленного грунта.
При работе кранами, находящимися в котловане, принимаются специальные меры по обеспечению сохранности естественной структуры грунтов ...
Цели научной работы
Основной целью научной работы является повышение эффективности поризованных гипсовых материалов за счет введения фотокатализаторов. Для достижения поставленной цели необходимо решить следующие задачи:
– обосновать возможность получения поризованных гипсовых материалов с добавлением фотокатализаторов, облад ...
Категории сайта
- Главная
- Расчеты в строительных работах
- Современная технология терраццо
- Железобетонные конструкции и изделия
- Плавательный бассейн
- Ремонт оштукатуренных поверхностей
- Информация по архитектуре