Расчет корректирующего звена

Асимптотическая ЛАЧХ корректирующего звена определяется в соответствии с основным соотношением частотного метода:
![]()
ЛАЧХ объекта, регулятора и желаемая ЛАЧХ приведены на рис.3.10
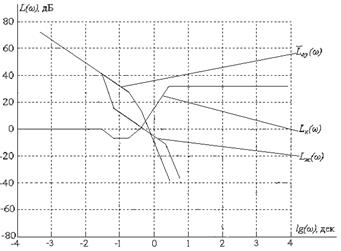
Рис.3.10. Логарифмические амлитудно - частотные характеристики
Затем по ![]() находится передаточная функция
находится передаточная функция ![]() с помощью процедуры, обратной по отношению к порядку построения ЛАЧХ объекта
с помощью процедуры, обратной по отношению к порядку построения ЛАЧХ объекта
![]() (3.9)
(3.9)
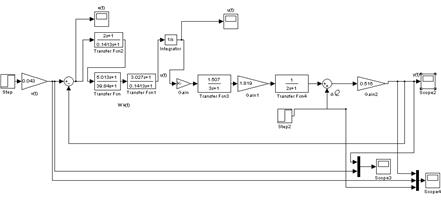
Рис. 3.11 Структурная схема замкнутой системы с регулятором
Результаты моделирования:
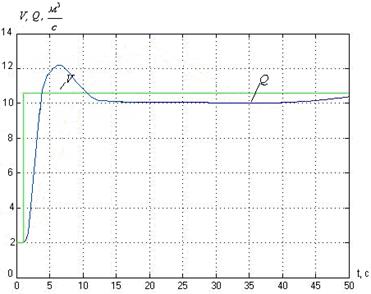
Рис.3.12 Переходный процесс в замкнутой системе с регулятором
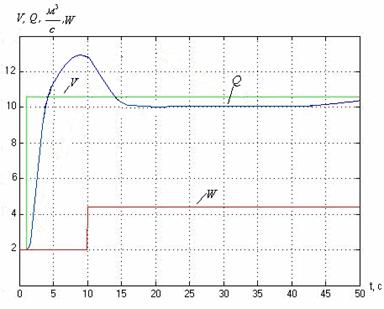
Рис. 3.13 Переходный процесс в замкнутой системе с возмущающим воздействием, обусловленным поршневым эффектом
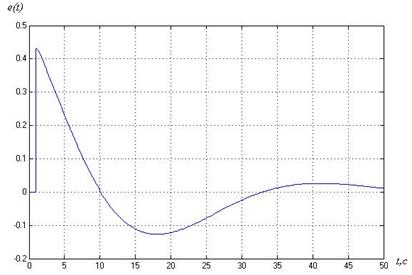
Рис.3.14 Ошибка в астатической системе
Из рис. 3.14 видно, что скоростная ошибка стремится к нулю по прошествии некоторого времени.
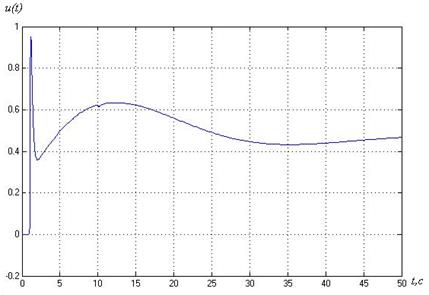
Рис.3.15 Управляющее воздействие
Технические нормативы проектирования транспортной развязки.
Главная дорога с интенсивностью движения 7500авто/сутки.
Второстепенная дорога с интенсивностью движения 3200 авто/сутки.
Пересечение осуществляется под углом 90°
Для определения категории дороги рассчитывается интенсивность движения с учётом ежедневного прироста подвижного состава за 20 лет.
(1)
где ...
Расчет консоли колонны
Консоль колонны
для опирания ригеля проектируем в соответствии с § XI.2, п. 3 и рис. XI. 17. Опорное давление ригеля Q=229 кН (см. расчет поперечных сил ригеля); бетон класса В25, Rb=14,5 МПа, γb2=0,9; Rbt=1,05 МПа; арматура класса A-II, Rs=365 МПа, Rsw=290 МПа.
Принимаем длину опорной площадки L=20 ...
Каменные работы
Процесс каменной кладки состоит из следующих операций: установка порядовок и натягивание причалки; подготовка растворной пастели, подача и разравнивание раствора; укладка камней на растворную постель с образованием швов. Порядовки устанавливают в углах кладки, в местах пересечения стен и на прямых участках ...
Категории сайта
- Главная
- Расчеты в строительных работах
- Современная технология терраццо
- Железобетонные конструкции и изделия
- Плавательный бассейн
- Ремонт оштукатуренных поверхностей
- Информация по архитектуре