Построение и описание обобщенной функциональной и структурной схем системы автоматизации

Обобщенная функциональная схема системы стабилизации температуры газов на входе в горелку приведена на рис.
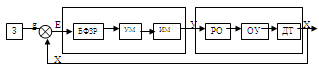
Рис. 6
На схеме приняты следующие обозначения: З – задатчик; БФзР – блок формирования закона регулирования; УМ – усилитель мощности; ИМ – исполнительный механизм; РУ – регулирующее устройство; РО – регулирующий орган; ОУ – объект управления; ДТ – датчик температуры.
РО, КД и ДТ образуют регулирования. Блоки БФзР, УМ, ИМ составляют регулирующее устройство. В соответствии с исходными данными для проектирования РУ должно быть ПИ-регулятором. ПИ-закон регулирования формируется блоком БФзР. Динамические свойства УМ соответствуют усилительному звену, благодаря чему усилитель мощности не вносит искажений в закон регулирования. Блок ИМ в динамическом отношении является интегрирующим звеном. Для исключения влияния исполнительного механизма на закон регулирования последовательно соединённые блоки УМ и ИМ следует охватить отрицательной обратной связью. Динамические свойства РО характеризуются усилительным звеном, ДТ – апериодическим звеном, а ОУ – апериодическим звеном запаздывания.
С учётом вышеизложенного структурная схема системы автоматизации, реализирующий ПИ-закон регулирования, имеет вид, показанный на рис.

Рис. 7 Структурная схема системы стабилизации температуры газов на входе в горелку
На схеме приняты следующие обозначения:
Wр(Р) = Кр – передаточная функция (ПФ) усилительного звена;
Wи(Р) = 1/рТи – ПФ интегрирующего звена БФзР;
Wум(Р) = Кум - ПФ усилителя мощности;
Wим(Р) = 1/рТим – ПФ исполнительного механизма;
Wро(Р) = Кро – ПФ регулирующего органа;
Wоу(Р) = Коу ∙ е –РТ/1+РТоу – ПФ печи; (1)
Wдт(Р) = Кдт /(1+рТдт) – ПФ датчика температуры;
Wос(Р) = Кос – ПФ звена обратной связи.
Используя принципы преобразования структурных схем, получим ПФ системы автоматизации в следующей последовательности.
Передаточная функция БФзР:
WБФзР (Р) = W(Р) [1+Wи (Р)]
ПФ регулирующего устройства:
Wру(Р) =WБФзР(Р) Wум(Р) Wим(Р) / [1+Wум(Р)Wим(Р)Wос(Р)
ПФ объекта:
![]()
ПФ системы автоматического регулирования:
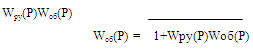
Соотношение (2) является искомым аналитическим выражением ПФ системы автоматизации, укрупнённая структурная схема которой представлена на рис.
Укрупненная структурная схема ПФ системы автоматизации
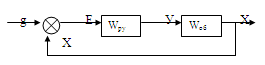
Рис. 8
Выбор фундамента и определение нагрузки на грунт
В соответствии с требуемой величиной площади подошвы Атр = 2,85 м2 и высотой фундамента Нф = d = 1,5 м, подбираем типовой фундамент серии 1.412-2/77.
Принимаем фундамент ФВ 12-1, размеры которого l = 4,2 м, b = 3,0 м, Нф = 1,5 м; объем бетона Vfun = 7,8 м3
Вычисляем расчетное значение веса фундамента и гр ...
Расчет сварных швов прикрепления раскосов и стоек к фасонкам и поясам фермы
Для сварки узлов фермы применяем полуавтоматическую сварку проволокой Св-08Г2С диаметром 1.4-2 мм.
Расчетные характеристики сварного соединения при катете шва kf=8 мм:
Rwf =200 МПА,
bf = 0.9; Rwz =165 МПа,
bz=1.05; gwz=gwf=1;тогда
Rwf =0.9×200=180 МПа>bz ×Rwz = 1.05×165 = 173.3 МПа ...
Понятие сертификации
Сертификация - процедура подтверждения соответствия, посредством которой независимая от изготовителя (продавца, исполнителя) и потребителя (покупателя) организация удостоверяет в письменной форме, что продукция соответствует установленным требованиям. Также сертификация - форма осуществляемого органом по се ...
Категории сайта
- Главная
- Расчеты в строительных работах
- Современная технология терраццо
- Железобетонные конструкции и изделия
- Плавательный бассейн
- Ремонт оштукатуренных поверхностей
- Информация по архитектуре